|
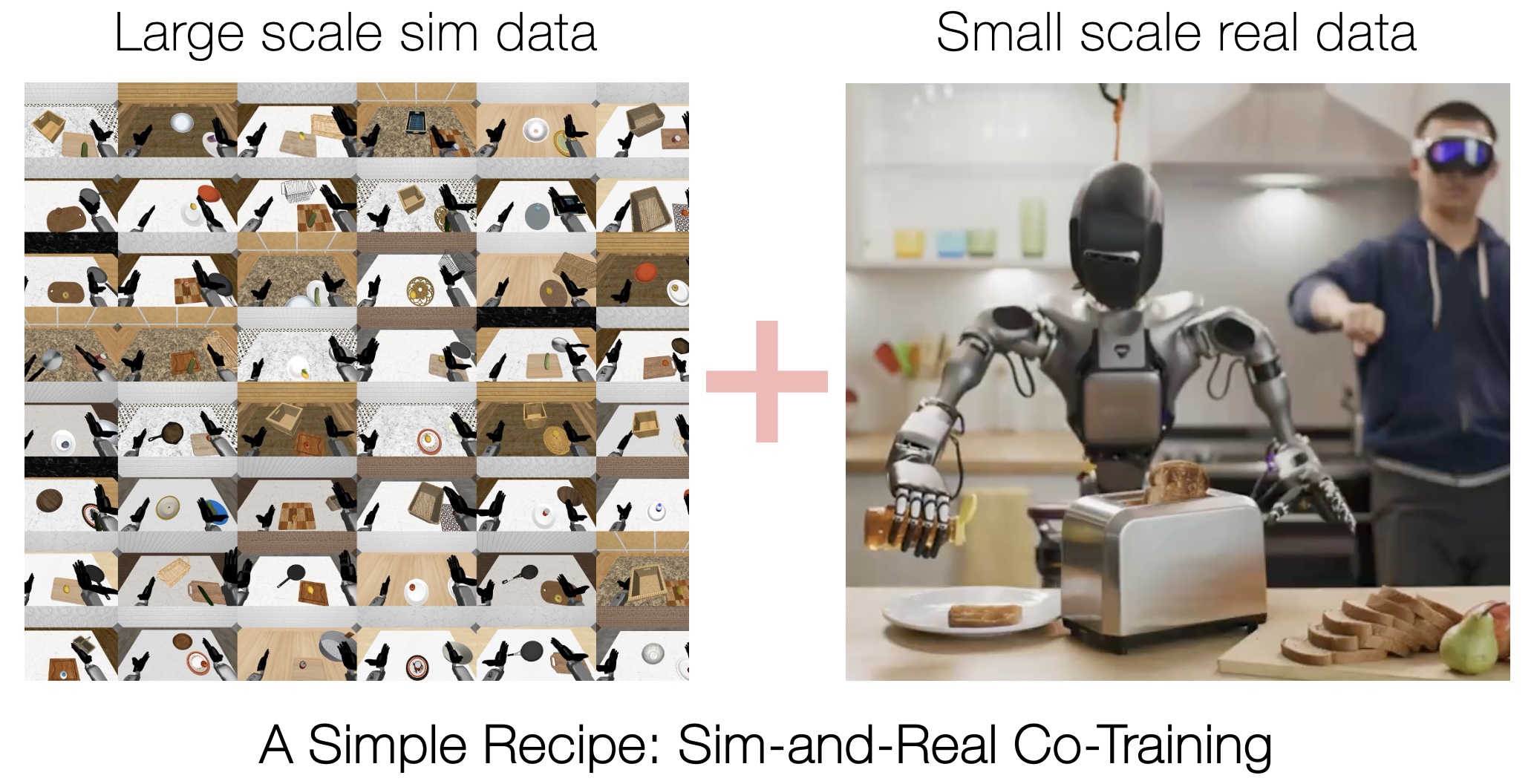
Sim-and-Real Co-Training: A Simple Recipe for Vision-Based Robotic Manipulation
Abhiram Maddukuri*, Zhenyu Jiang*, Lawrence Yunliang Chen*, Soroush Nasiriany*, Yuqi Xie, Yu Fang, Wenqi Huang, Zu Wang, Zhenjia Xu, Nikita Chernyadev, Scott Reed, Ken Goldberg, Ajay Mandlekar†, Linxi Fan†, Yuke Zhu†
Robotics: Science and Systems (RSS), 2025
|

|
robosuite: A Modular Simulation Framework and Benchmark for Robot Learning
Yuke Zhu, Josiah Wong, Ajay Mandlekar, Roberto Martín-Martín, Abhishek Joshi, Kevin Lin, Abhiram Maddukuri, Soroush Nasiriany, Yifeng Zhu
Technical report, 2025
|

|
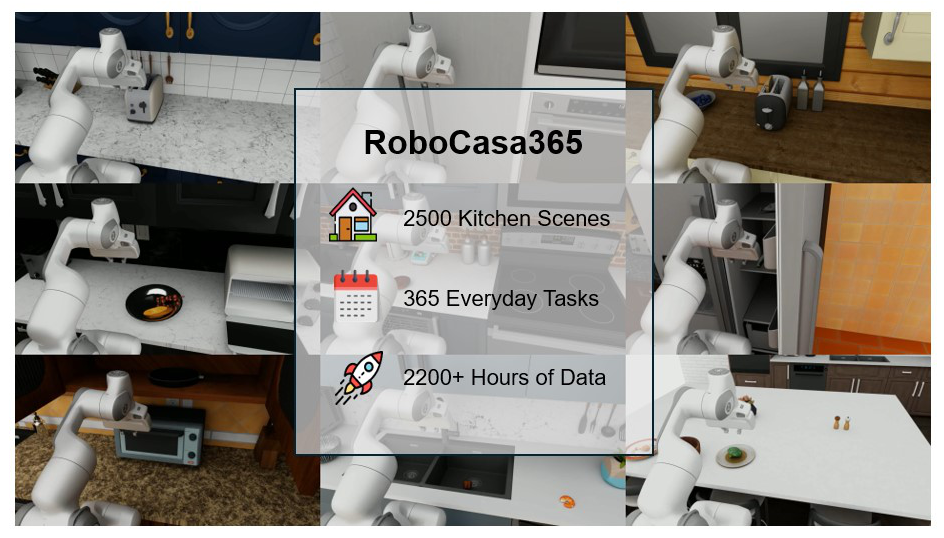
RoboCasa: Large-Scale Simulation of Everyday Tasks for Generalist Robots
Soroush Nasiriany, Abhiram Maddukuri*, Lance Zhang*, Adeet Parikh, Aaron Lo, Abhishek Joshi, Ajay Mandlekar, Yuke Zhu
Robotics: Science and Systems (RSS), 2024
|